

To help Linux developers speed up development, Intrepid Control Systems announced an open source API called libicsneo earlier this year. It can be used with python_ics to integrate Intrepid vehicle networking hardware to any Python application running Linux, Mac or Windows. In this tutorial you will learn how to Transmit and Receive high speed CAN or CAN FD messages using Raspberry Pi with any Intrepid tools such as ValueCAN 4series. Please reference the API for list of supported hardware. We will be using ValueCAN 4–2 two channel of CAN or CAN FD.
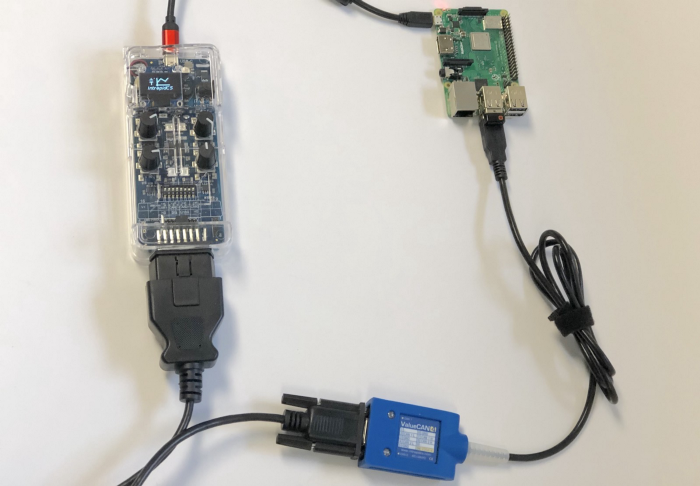
Hardware Setup
Connect ValueCAN 4–2 using DB-9F to OBD-II cable to neoOBD2 Simulator (optional) to receive or transmit CAN messages instead of a car.
Before you get started make sure you have the following dependencies
- CMake 3.2 or above
- GCC 4.7 or above, 4.8+ recommended
- libusb-1.0–0-dev
- build-essential is recommended
Build libicsneo project and link libicsneoleagacy.so file to your Python project.
Open Terminal
Clone libicsneo git repository
git clone “https://github.com/intrepidcs/libicsneo.git”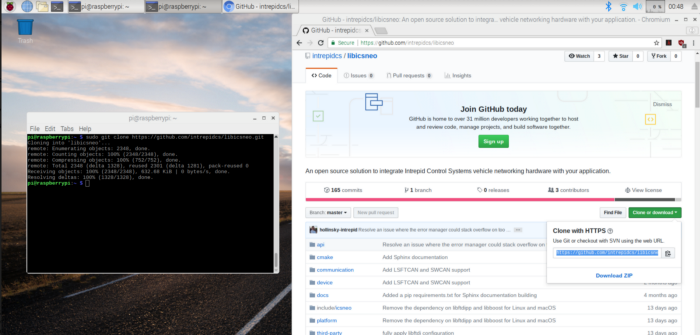
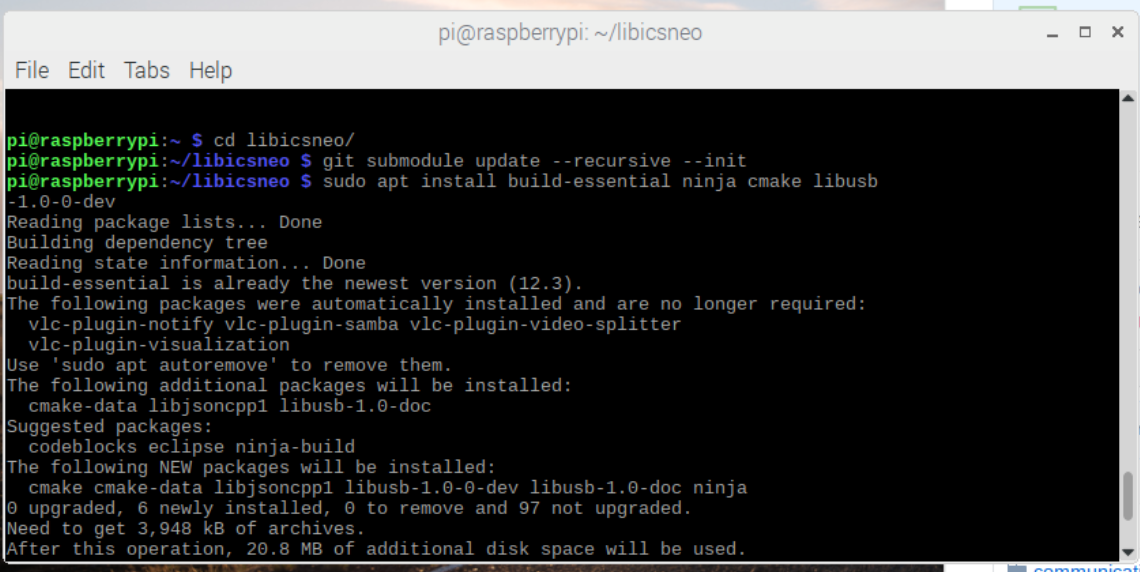
Check to see if you have install all dependencies
cd libicsneo/ git submodule update — recursive — init sudo apt install build-essential ninja cmake libusb
Create a build folder and make the project
mkdir -p build && cd build && cmake .. & make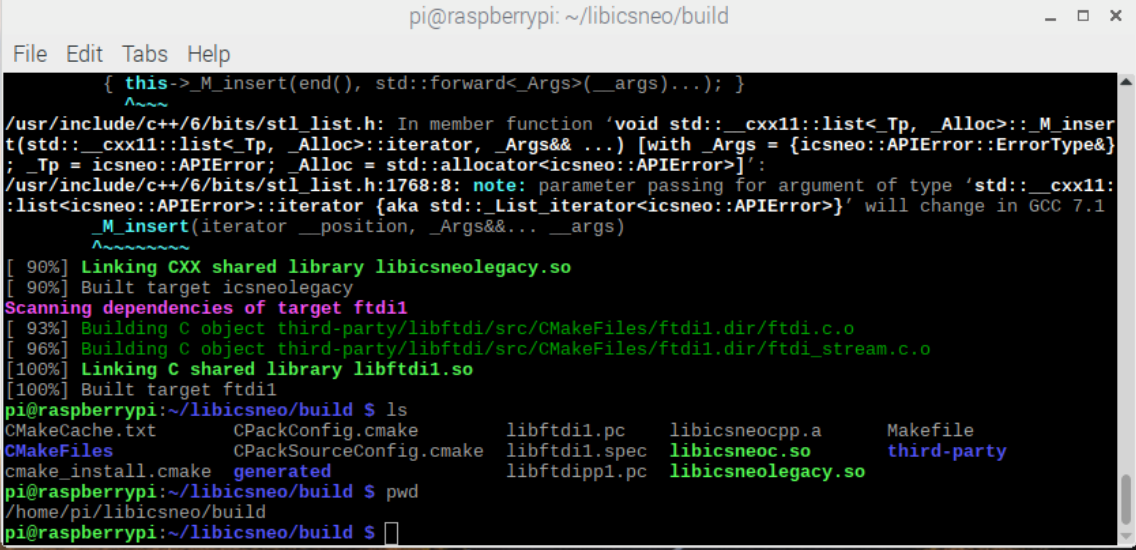
Installing python_ics
To install python_ics you can use either of this command
sudo python3 -m pip install python_icsor
sudo pip3 install python_icsCreate a new Python project and copy paste the example code from the python_ics or you can download the open_device_example.py from github page https://github.com/intrepidcs/python_ics/blob/master/examples/open_device_example.py
Open Python IDE and link libicsneolegacy.so by adding this line at the top of your script
ics.override_library_name(“/home/pi/libicsneo/build/libicsneolegacy.so”)Run your Python file
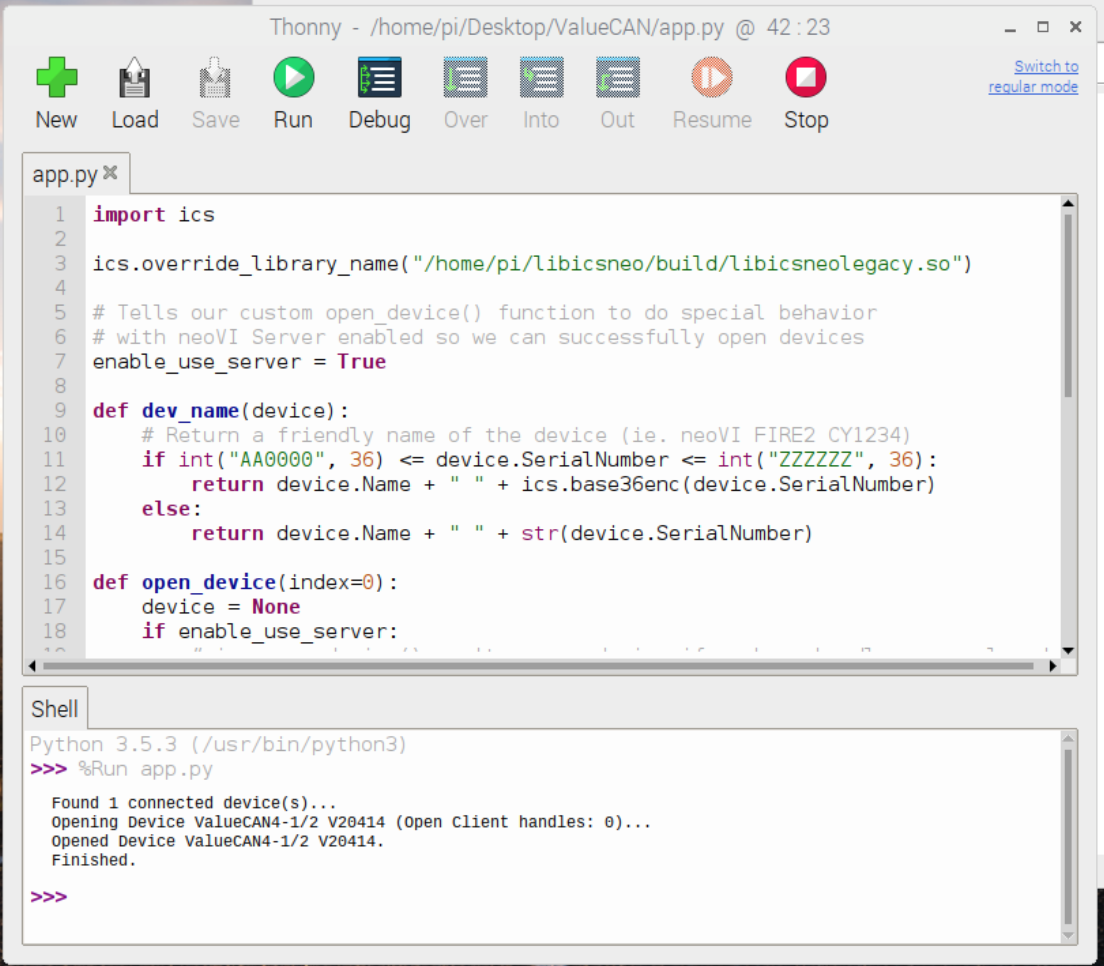
Note if you don’t see your device, try turning off the raspberry Pi and turn back on with device plugged in.
Receive Messages
Use this function to Receive CAN messages
def receive_can(device): msgs, error_count = ics.get_messages(device) print("Received {} messages with {} errors.".format(len(msgs), error_count)) for i, m in enumerate(msgs): print('Message #{}\t'.format(i+1), end='') print('\tArbID: {}\tData: {}'.format(hex(m.ArbIDOrHeader), [hex(x) for x in m.Data]))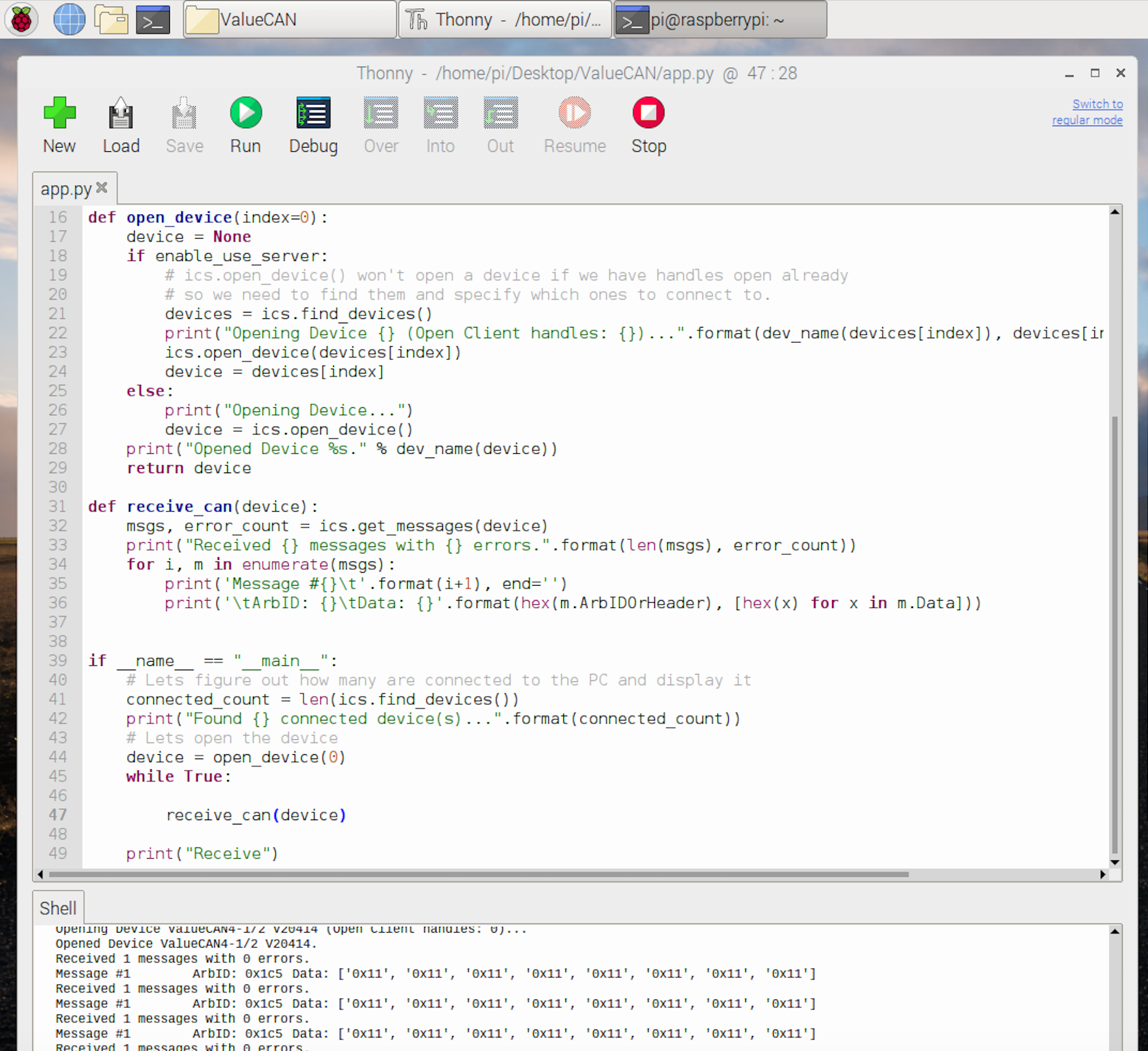
Transmit Messages
Use this function to Transmit CAN messages
def transmit_can(device): msg = ics.SpyMessage() msg.ArbIDOrHeader = 0x01 # CAN Arbitration ID msg.Data = (1,2,3,4,5,6,7,8) # Data Bytes go here msg.NetworkID = ics.NETID_HSCAN # First channel of CAN # msg parameter here can also be a tuple of messages ics.transmit_messages(device, msg)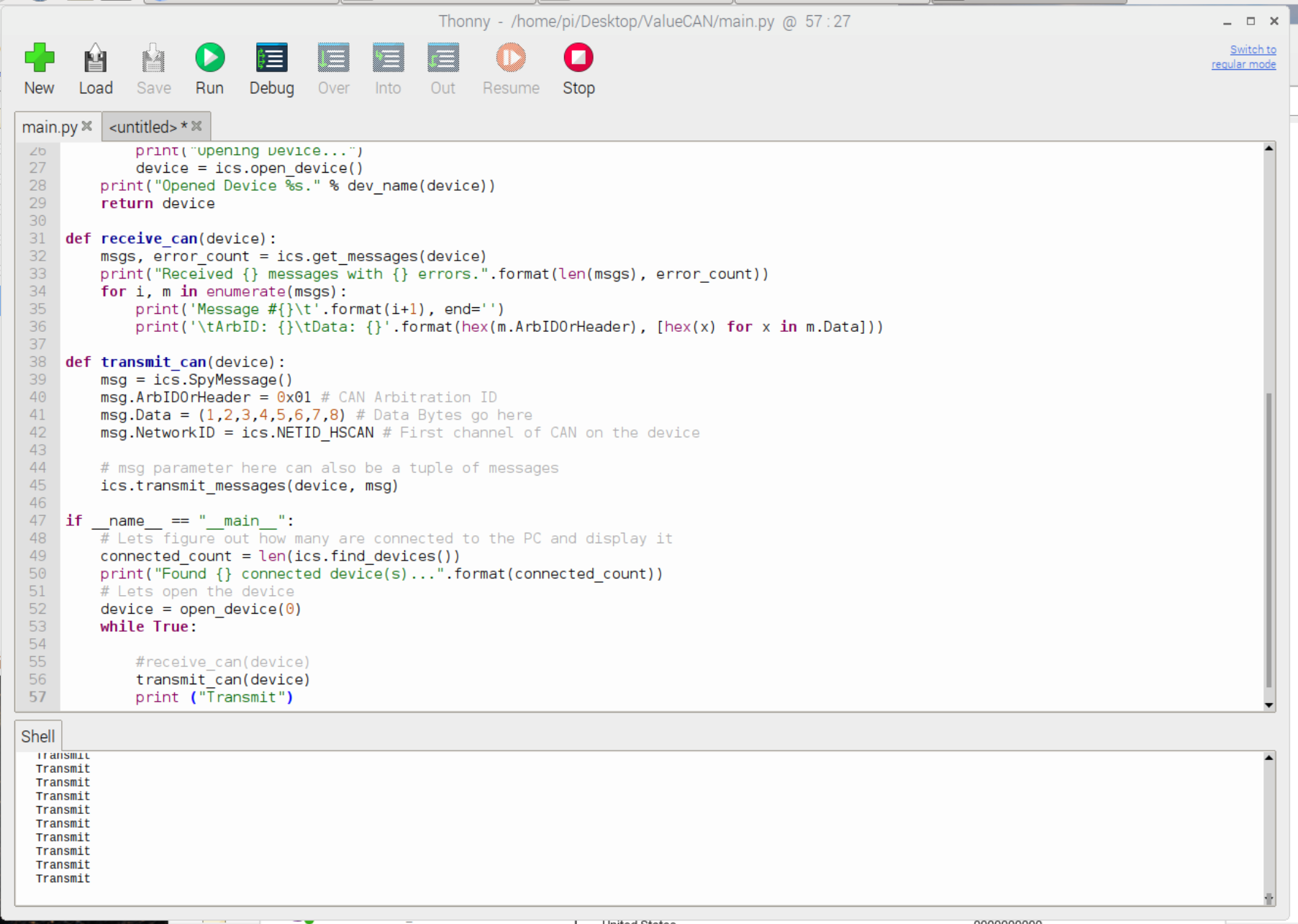
So to recap:
- Build libicsneo project
- install python_ics
- link libicsneolegacy.so file on your python project
You can read the full documentation for libicsneo at https://libicsneo.readthedocs.io/en/latest/ and Python documentation at https://python-ics.readthedocs.io/en/2.15/.


